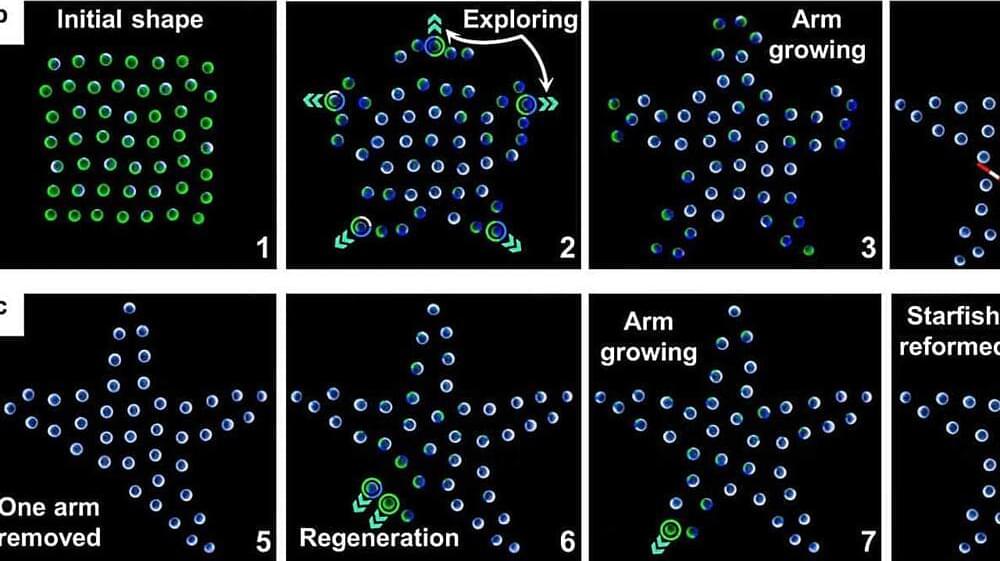
Researchers have proposed a new strategy for the shape assembly of robot swarms based on the idea of mean-shift exploration: When a robot is surrounded by neighboring robots and unoccupied locations, it actively gives up its current location by exploring the highest density of nearby unoccupied locations in the desired shape.
The study, titled, “Mean-shift exploration in shape assembly of robot swarms,” has been published in Nature Communications.
This idea is realized by adapting the mean-shift algorithm, an optimization technique widely used in machine learning for locating the maxima of a density function.